人教版物理八年级下册《杠杆》简单机械PPT(第1课时杠杆平衡条件)
展开
《杠杆》简单机械PPT(第1课时杠杆平衡条件)
第一部分内容:知 识 管 理
1.杠杆
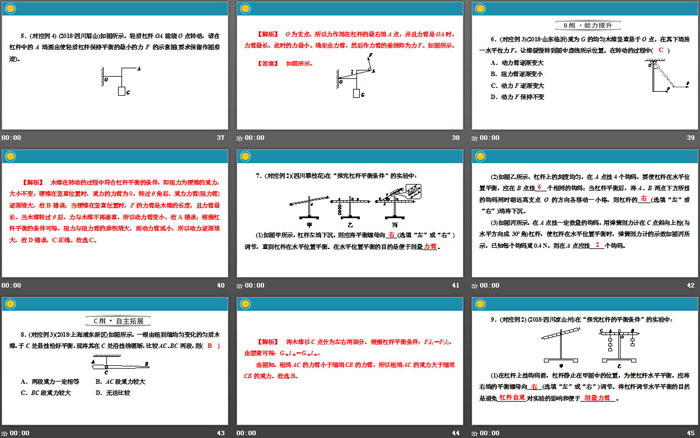
定义:一根硬棒,在力的作用下能绕着____ 转动,这根硬棒就是杠杆。
条件:一根硬棒能成为杠杆,应具备两个条件:(1)要有力的作用;(2)能绕某个固定点转动。
2.杠杆的五要素
支点:杠杆可以绕其转动的点,用字母“O”表示。
动力:使杠杆转动的力,用字母“F1”表示。
阻力:阻碍杠杆转动的力,用字母“F2”表示。
动力臂:从支点到动力作用线的距离,用字母“l1”表示。
阻力臂:从支点到阻力作用线的距离,用字母“l2”表示。
注意:支点可以在杠杆的一端,也可以在杠杆上的其他位置。
3.杠杆力臂的画法
步骤:(1)找支点O;(2)画力的作用线;(3)画力臂(过支点向力的作用线作垂线);(4)标力臂。
归纳:一找支点、二画线、三连距离、四标记。
4.杠杆的平衡条件
实验:研究杠杆平衡条件时,让杠杆在水平位置平衡,是为了在杠杆上直接量出力臂。
公式:动力×动力臂=阻力×阻力臂或F1l1=F2l2。
易错点:杠杆是否平衡,不是看力的大小,也不是看力臂的长短,而是看力与力臂的乘积。
... ... ...
杠杆PPT,第二部分内容:归 类 探 究
类型之一 杠杆的五要素
(2018•四川峨眉山)关于杠杆,下列说法正确的是( )
A.杠杆一定是一根直的硬棒
B.杠杆的支点一定在杠杆上,且在杠杆的中间位置
C.力臂可能在杠杆上也可能不在杠杆上
D.作用在杠杆上的动力一定与杠杆的阻力相反
【解析】杠杆的形状不是固定的,例如滑轮、剪刀、筷子等都是杠杆,故A说法不正确;支点指杠杆在转动过程中固定不变的点,不一定在杠杆的中间位置,故B说法不正确;只有杠杆在水平位置平衡时,力臂才在杠杆上,故C说法正确;当支点位于一侧时,动力和阻力的方向相反,当支点位于中间时,动力和阻力方向相同,故D说法不正确。故选C。
【点悟】本题是一道综合性较强的题目,在解题时要结合杠杆的五要素认真分析每一个选项,属于基础知识的考查。
【规律归纳】杠杆可以是直棒,也可以是弯曲的;从力的大小来分类,有省力杠杆、费力杠杆和等臂杠杆;作用在杠杆上的两个力可以在支点的同侧,也可以在异侧;省力杠杆一定费距离,费力杠杆一定省距离,等臂杠杆既不省力也不省距离。
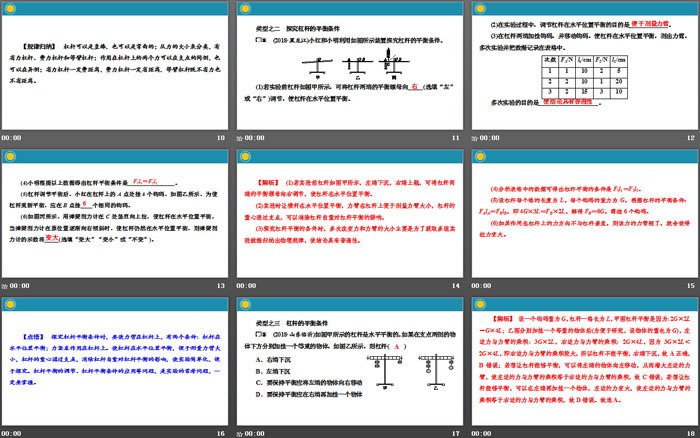
类型之二 探究杠杆的平衡条件
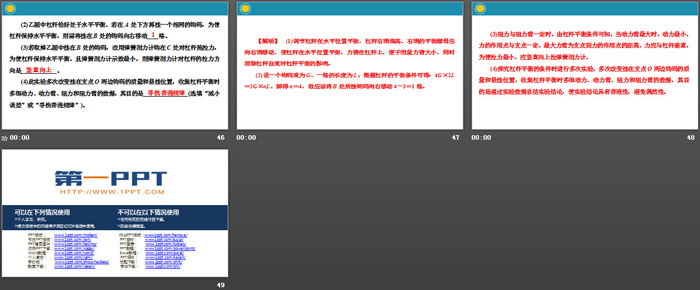
(2018•黑龙江)小红和小明利用如图所示装置探究杠杆的平衡条件。
(1)若实验前杠杆如图甲所示,可将杠杆两端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。
(2)在实验过程中,调节杠杆在水平位置平衡的目的是 。
(3)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数据记录在表格中。
多次实验的目的是___________。
(4)小明根提以上数据得出杠杆平衡条件是____________。
(5)杠杆调节平衡后,小红在杠杆上的A点处挂4个钩码,如图乙所示,为使杠杆重新平衡,应在B点挂____个相同的钩码。
(6)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将____(选填“变大”“变小”或“不变”)。
【解析】(1)若实验前杠杆如图甲所示,左端下沉,右端上翘,可将杠杆两端的平衡螺母向右调节,使杠杆在水平位置平衡。
(2)实验时让横杆在水平位置平衡,力臂在杠杆上便于测量力臂大小,杠杆的重心通过支点,可以消除杠杆自重对杠杆平衡的影响。
(3)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,使结论具有普遍性。
(4)分析表格中的数据可得出杠杆平衡的条件是F1l1=F2l2。
(5)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:FAlA=FBlB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码。
(6)如果作用在杠杆上的力方向不与杠杆垂直,则该力的力臂短了,就会使得拉力变大。
【点悟】探究杠杆平衡条件时,要使力臂在杠杆上,有两个条件:杠杆在水平位置平衡;力竖直作用在杠杆上。使杠杆在水平位置平衡,便于测量力臂大小,杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响,使实验简单化,便于探究。杠杆平衡的调节、杠杆平衡条件的应用等问题,是实验的常考问题,一定要掌握。
类型之三 杠杆的平衡条件
(2018•山东临沂)如图甲所示的杠杆是水平平衡的。如果在支点两侧的物体下方分别加挂一个等重的物体,如图乙所示,则杠杆( )
A.右端下沉
B.左端下沉
C.要保持平衡应将左端的物体向右移动
D.要保持平衡应在右端再加挂一个物体
【解析】设一个钩码重为G,杠杆一格长为L,甲图杠杆平衡是因为:2G×2L=G×4L;乙图分别加挂一个等重的物体后(为便于研究,设物体的重也为G),左边力与力臂的乘积:3G×2L,右边力与力臂的乘积:2G×4L,因为3G×2L<2G×4L,即右边力与力臂的乘积较大,所以杠杆不能平衡,右端下沉,故A正确,B错误;若想让杠杆能够平衡,可以将左端的物体向左移动,从而增大左边的力臂,使左边的力与力臂的乘积等于右边的力与力臂的乘积,故C错误;若想让杠杆能够平衡,可以在左端再加挂一个物体,左边的力变大,使左边的力与力臂的乘积等于右边的力与力臂的乘积,故D错误。故选A。
... ... ...
杠杆PPT,第三部分内容:当 堂 测 评
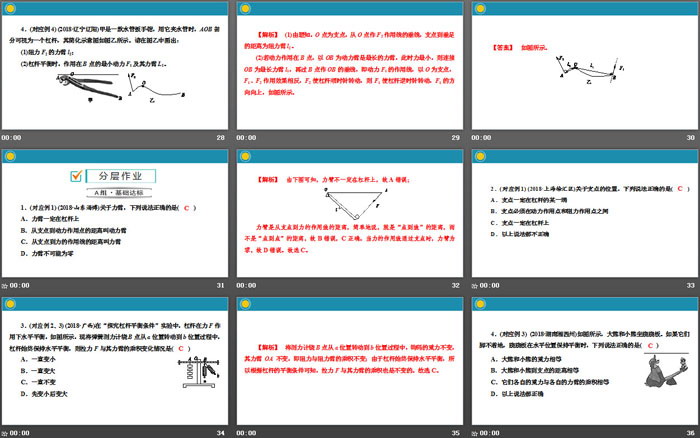
1.(对应例2)(2018•江苏南通)如图所示是某同学“探究杠杆平衡条件” 的实验装置,实验中杠杆始终处于水平平衡状态。下列方法中不会使弹簧测力计的示数变化的是( )
A.将钩码的悬挂点由A向B移动
B.将测力计连接点由B向A移动
C.减少A处所悬挂钩码的个数
D.增加B处拉杠杆的细线长度
【解析】将钩码的悬挂点由A向B移动,阻力臂增大,阻力、动力臂不变,根据杠杆的平衡条件,动力变大,即弹簧测力计的示数变大,故A错误;将测力计连接点由B向A移动,阻力、阻力臂不变,动力臂减小,根据杠杆的平衡条件,动力变大,即弹簧测力计的示数变大,故B错误;减少A处所悬挂钩码的个数,阻力臂、动力臂不变,阻力减小,根据杠杆的平衡条件,动力变小,即弹簧测力计的示数变小,故C错误;增加B处拉杠杆的细线长度,阻力、阻力臂、动力臂不变,根据杠杆的平衡条件,动力也不变,即弹簧测力计的示数不会变化,故D正确。故选D。
2.(对应例3)(广东东莞)如图所示,杠杆在水平位置静止,若将两边的钩码数都增加一个,则杠杆( )
A.左端降低,右端升高
B.右端降低,左端升高
C.保持水平不动
D.无法确定
3.(对应例1)杠杆的五要素:_____ (使杠杆绕着转动的固定点)、_____(使杠杆转动的力F1)、_____(阻碍杠杆转动的力F2)、_____ (从 _____到动力作用线的距离l1)、_____(从支点到阻力作用线的距离l2)。
... ... ...
杠杆PPT,第四部分内容:分 层 作 业
1.(对应例1) (2018•山东淄博)关于力臂,下列说法正确的是( )
A.力臂一定在杠杆上
B.从支点到动力作用点的距离叫动力臂
C.从支点到力的作用线的距离叫力臂
D.力臂不可能为零
【解析】由下图可知,力臂不一定在杠杆上,故A错误;
力臂是从支点到力的作用线的距离,简单地说,就是“点到线”的距离,而不是“点到点”的距离,故B错误,C正确。当力的作用线通过支点时,力臂为零,故D错误。故选C。
2.(对应例1) (2018•上海徐汇区)关于支点的位置,下列说法正确的是( )
A.支点一定在杠杆的某一端
B.支点必须在动力作用点和阻力作用点之间
C.支点一定在杠杆上
D.以上说法都不正确
3.(对应例2、3) (2018•广西)在“探究杠杆平衡条件”实验中,杠杆在力F作用下水平平衡,如图所示,现将弹簧测力计绕B点从a位置转动到b位置过程中,杠杆始终保持水平平衡,则拉力F与其力臂的乘积变化情况是( )
A.一直变小
B.一直变大
C.一直不变
D.先变小后变大
... ... ...
关键词:人教版八年级物理下册PPT课件免费下载,杠杆PPT下载,简单机械PPT下载,杠杆平衡条件PPT下载,.PPT格式;
 无忧课件网公众号
无忧课件网公众号